技術情報
技術情報
振動制御技術
振動制御技術の大きな目的は、
①振動を低減する、②動特性を改善する、③振動を利用するの三つです。
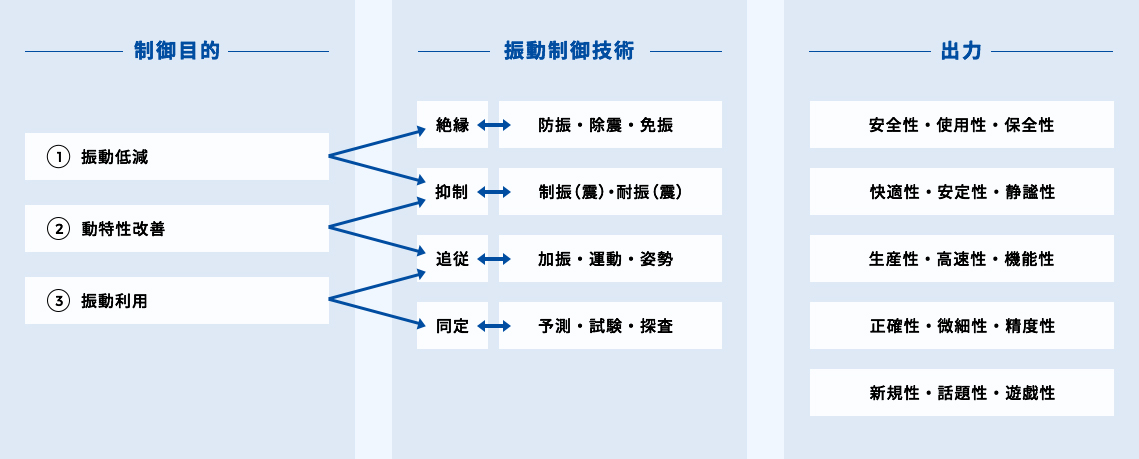
これら3つの目的を実現するために、「絶縁・抑制・追従・同定」などの技術が用いられています。
制御技術としては「防振・除振・免震」などがよく使われますが、これらは全て振動の絶縁技術を基礎とします。
また「制振」や「耐震」と呼ばれる技術は振動の抑制技術にあたり、双方併せて振動低減に用いられます。
振動特性の改善には、抑制技術に加え、追従という制振技術を用い、「加振・運動・姿勢制御」などがこれにあたり、
例えばロボットの運動効率を上げることに用いられています。
制御技術としては「防振・除振・免震」などがよく使われますが、これらは全て振動の絶縁技術を基礎とします。
また「制振」や「耐震」と呼ばれる技術は振動の抑制技術にあたり、双方併せて振動低減に用いられます。
振動特性の改善には、抑制技術に加え、追従という制振技術を用い、「加振・運動・姿勢制御」などがこれにあたり、
例えばロボットの運動効率を上げることに用いられています。
-
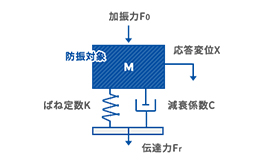
設備機械から建築構造物へ伝わる振動を絶縁する技術
防振技術
-
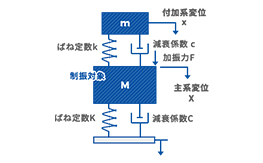
構造特性を改善し、風や歩行による不快な揺れを抑える技術
制振技術
-
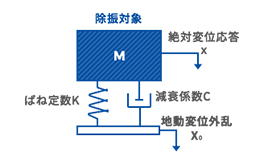
精密機器の性能に関わる周囲の振動を絶縁する技術
除振技術
-
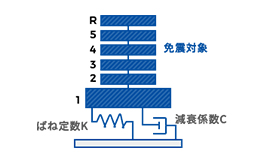
地震動から構造物、重要な設備・財産を守る絶縁技術
免震技術
減震技術 
省スペース設計された対策デバイスにより、地震時の設備機器破損被害を最小限に抑える技術